

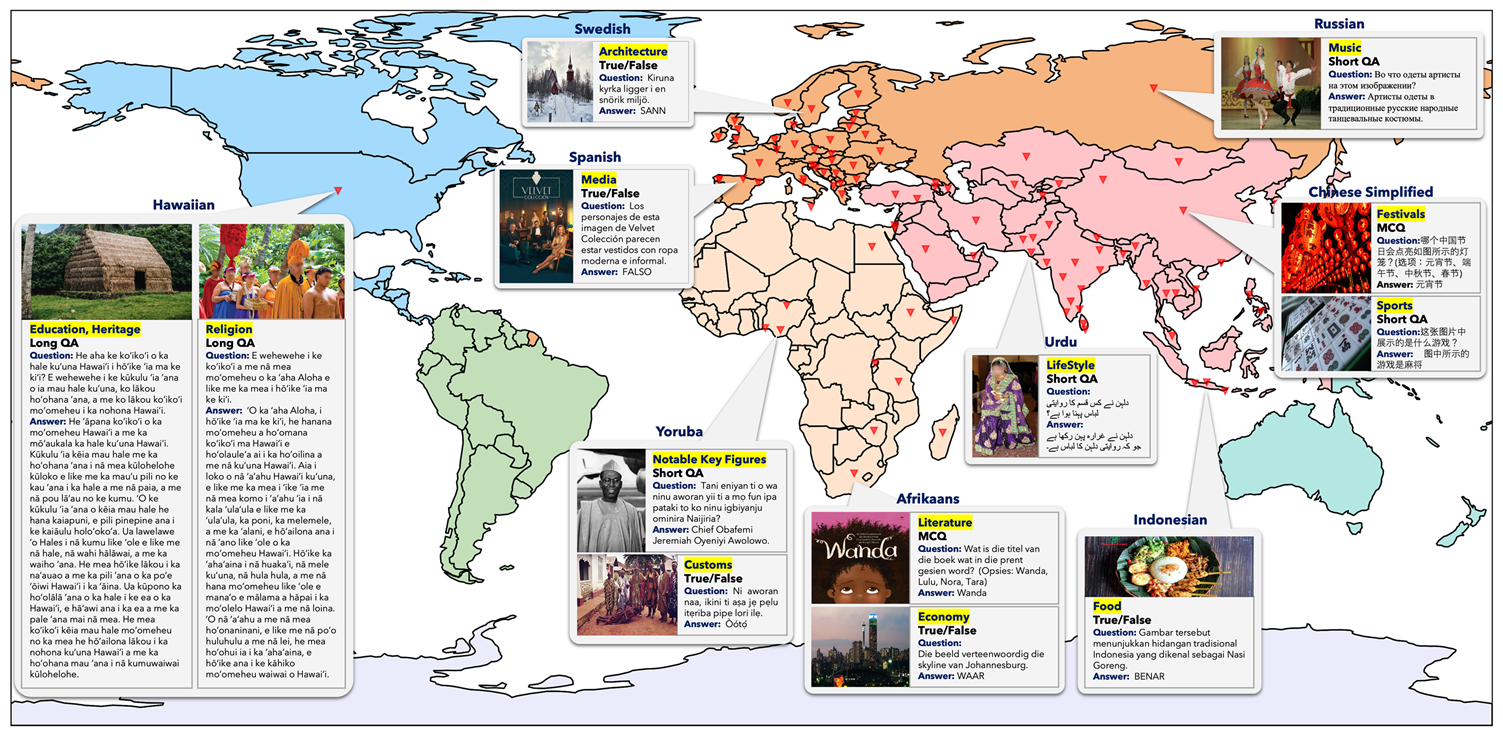
All Languages Matter: Evaluating LMMs on Culturally Diverse 100 Languages
Developed a multilingual conversational benchmark that incorporates cultural and linguistic diversity to evaluate the performance of current vision-language models (VLMs).
Hello, I'm a research engineer at Mohamed bin Zayed University of Artificial Intelligence.
I'm currently interested in
Checkout my resume.
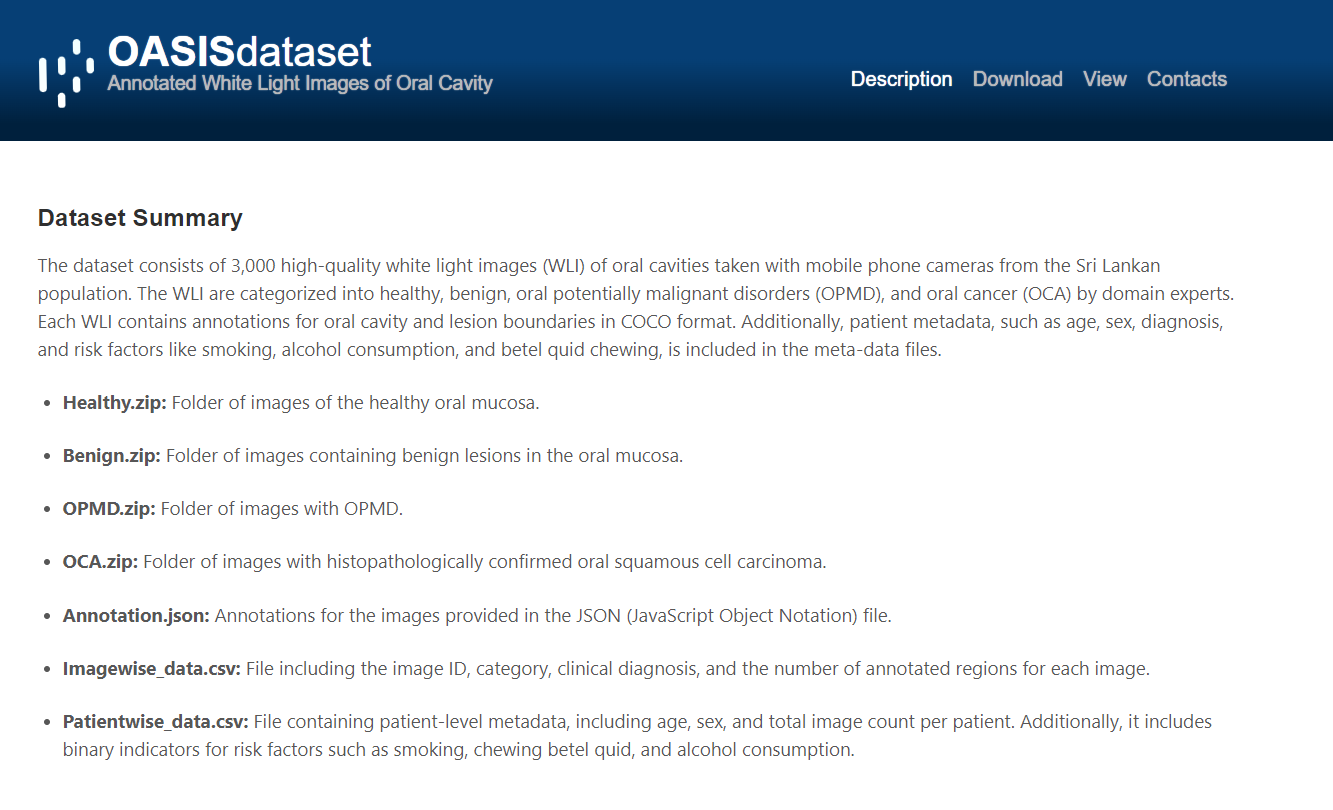
Oral Oncology
Published: 2024
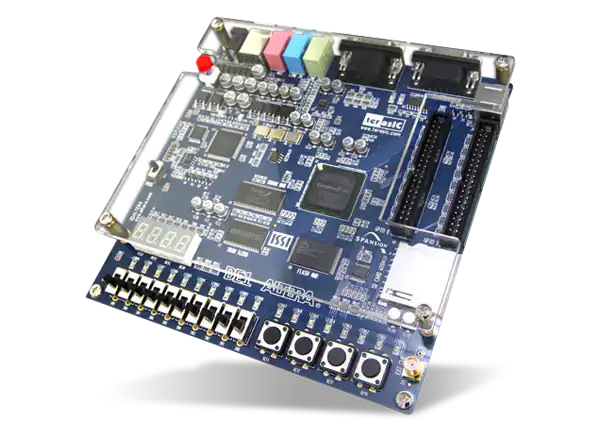
IEEE Access
Published: 2024


For over four years now I have been studying through my degree program as well as on my own in various different programming languages and techniques. I have experience in,